







KWD100 Handheld Depth Sounder
Handheld Portable Depth Sounder
Description
Introduction
Based on the principle of ultrasonic ranging, it can realize underwater ranging and underwater depth measurement. The characteristics of KWD100 Handheld Depth Sounder are that it can use the transducer attached to the machine for depth measurement; it can also be powered externally, communicate externally, and mount various ranging sensors of the company to perform corresponding ranging work. It can read the signal status of the transducer and sensor to facilitate relevant judgment.
Appearance

1. Power Switch: Used to turn the handheld terminal on and off.
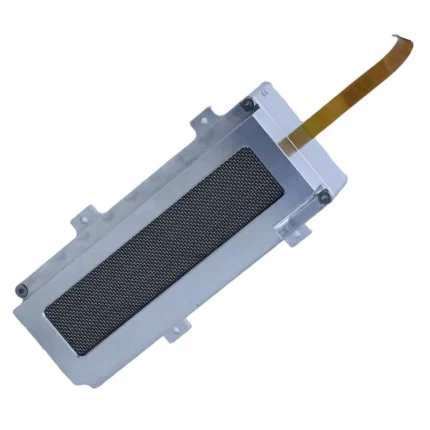
2. Transducer Connector: Used to connect various types of ultrasonic transducers.
3. Sensor Connector: Used to connect various types of distance-measuring sensors.
4. Voltage Adjustment Knob: Used to adjust the output power supply voltage (12~24V).
5. Button Input: Used for device interaction.
6. LCD Screen: Displays various values and graphics.
Connectable to sensors
KUS-W33 Underwater Obstacle Avoidance Sensor
KUS-W36 Underwater Obstacle Avoidance Sensor
KUS-W50 Underwater Obstacle Avoidance Sensor
KUS-W80 Underwater Obstacle Avoidance Sensor